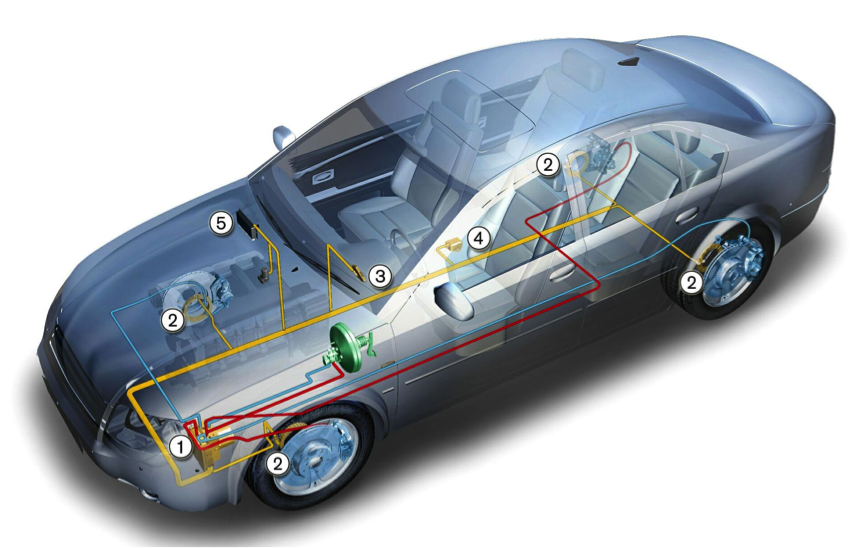
Nexteer Automotive developed a torque overlay solution which analyzes input from multiple vehicle systems to determine the appropriate steering wheel response to various conditions. Nexteer Automotive’s torque overlay is applied to an electric power steering (EPS) system through software programming and enhancements to existing hardware.
What is Torque Overlay?
Torque Overlay can add or subtract torque to the steering system, independently of driver input, in either direction.
What are Torque Overlay Features?
Torque Overlay includes the following features :
- Return
- Damping
- Lead/Pull Compensation (See glossary)
- Wind Gust Mitigation
- Lane Keeping Assistance
- Park Assist
- Vehicle Stability Control
- Yaw Stability Control
In order to apply these commands, these algorithms are developed using inputs from various sensor subsystems within the EPS system and for certain features from alternate sensors and subsystems. Those features are integrated into the EPS control system to provide a total control to the driver optimizing performance and driver comfort.
The Torque Overlay features applied to EPS determine:
- An appropriate response of the steering wheel
- An integration with base EPS functions to provide transparency to the driver
Comfort and convenience features
Return Function: Nexteers return function is part of the base steering function using internal EPS sensor information along with vehicle speed sensor information. The feature provides the following enhancements:
- Enhance returnability characteristics of vehicle with assisted return to center
- Speed sensitive tuning capability
- Provides chassis design & tuning flexibility
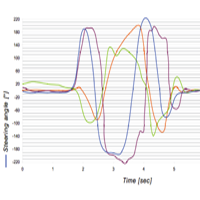
The following graph shows the steering wheel position versus the time for both Active Return On and Off:
The following videos demonstrate the Active Return effect:
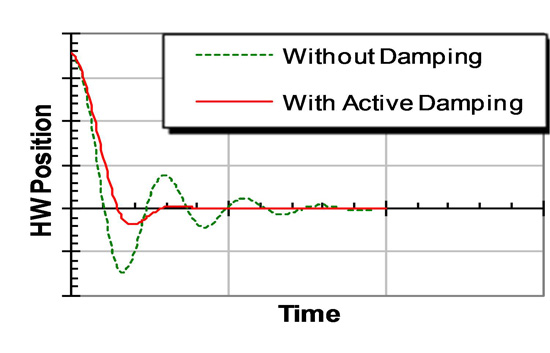 Active Damping Function: It is part of the base steering function using internal EPS sensor information along with vehicle speed sensor information. The feature provides the following enhancements:
Active Damping Function: It is part of the base steering function using internal EPS sensor information along with vehicle speed sensor information. The feature provides the following enhancements:
- Minimize vehicle free control problems
- Speed sensitive tuning capability
- Provides chassis design & tuning flexibility
The following videos demonstrate the Active Damping effect:
Active Lead/Pull Compensation Function: Lead/Pull compensation function is part of the base steering function using internal EPS sensor information along with vehicle speed sensor information. The feature provides the following enhancements:
Long-Term PULL Compensation:
- Provides a torque offset within the steering system to reduce driver fatigue and effort due to:
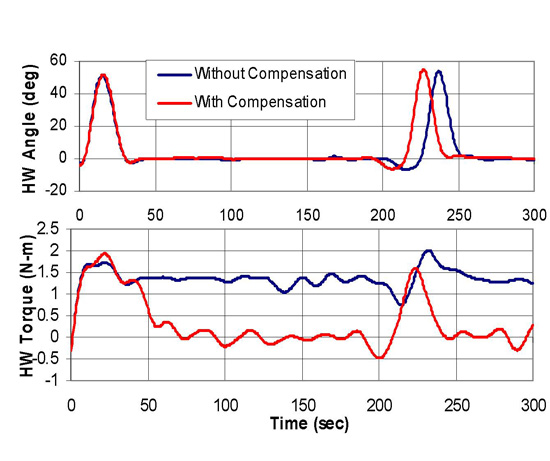
- Tire variation and wear
- Chassis & vehicle imbalances
- Potential warranty cost reduction
Short-Term PULL Compensation:
- Provides a torque offset within the steering system to compensate for:
- Crowned roads
- Steady cross-wind
- Wind gust compensation with additional sensors (Future)
- Increases driver comfort and reduces fatigue
The videos below illustrate Pull Compensation function:
Stability control enhancements
Yaw Stability Function: This is part of the integration of advanced algorithms within the EPS unit that works simultaneously with the stability control (ESP) and anti-lock braking system (ABS). The feature provides the following enhancements:
- Provides a steering torque suggestion to reduce the likelihood of a loss of directional control
- Reduces steering energy required for corrections
- Steering action leads brake activation and reduces brake intrusiveness
The following videos show the Yaw Stability function (left video: system off, right video: system on)
Split mu Function: Split mu stability function is part of the integration of algorithms within the EPS unit that works simultaneously with the stability control anti-lock braking system. The feature provides the following enhancements:
- Provides a steering torque or angle to compensate for the yaw moment generated by the side-to-side imbalance of braking forces
- Enables the brake system to build maximum braking forces quicker to minimize stopping distance on split-mu surfaces (Surfaces with different grip coefficients).
- Integration of ABS and Steering controls

Advanced functionalities
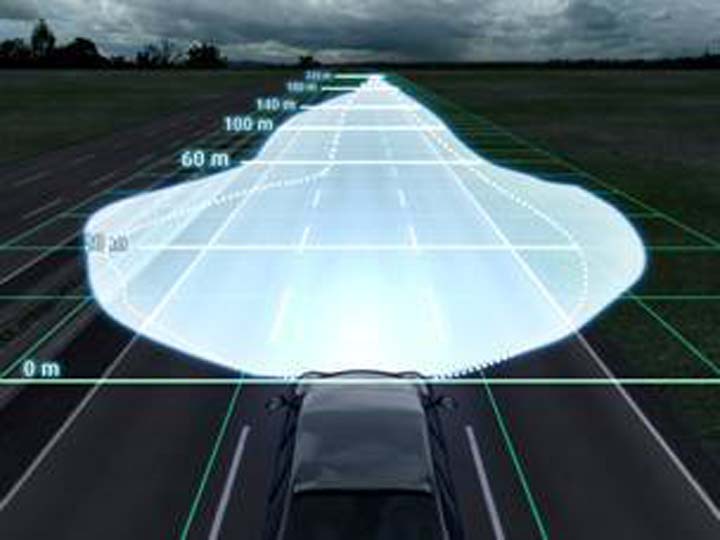
Lane keeping Function: Lane Keeping function is part of the integration of algorithms within the EPS unit that works by taking the vehicle lane position information from a lane departure warning system/camera. The feature provides the following enhancements:
- Provides steering torque to assist the driver in remaining within lane when a potential departure is recognized.
- Helps avoid unintended lane departures, a leading cause of accidents
- Driver can over-ride correction, if needed
Park Assist Function: Park Assist function is part of the integration of algorithms within the EPS unit that works by taking position command information from a park assist sensing subsystem. The feature provides the following enhancements:
- Automatic steering control during parallel park assist operation
- Reduced parking time and driver fatigue
- Optimized distance to curb
As a conclusion, it can be said that these features are beneficial for the driver in terms of safety and comfort.
Source: Nexteer
Romain Nicolas opinion:
These technologies look pretty complex as they impact the torque control structure of the vehicle. This might imply a lot of verification work and a robust Software design which means answering norms or standards like Autosar or ISO26262 (respectively related to Software development and functional safety). Moreover, the customer might feel that he is losing the control of its vehicle when the force feedback in the steering wheel is different depending on the road, the speed and so on. This might lead to customer dissatisfaction or even fear. How is analyzed customer acceptance to these products? How the safety is addressed during the development of such functionalities? Is this kind of technology will be rolled out over every manufacturer?








Pl explain with block diagrams.