Automotive control functions are often specified in MATLAB®/Simulink®. With the deployment of prototyping methods, the development of control functions becomes more efficient, rapid, and reliable. Through prototyping, users can identify and correct errors early. This avoids time intensive and costly iterations during software development. Through the use of the new ETAS INTECRIO-RLINK Prototyping Blockset, Simulink® models can be easily tested on-board the vehicle.
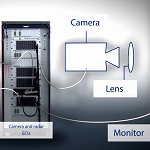
Control function development, test and calibration engineers require early validation and calibration of Simulink® models with the INCA measurement and calibration tool or any other. The ETAS INCA-VLINK Blockset allows the deployment of Simulink® models as executable programs running on standard Windows PCs. Through the use of INCA-VLINK, validation and calibration tasks can be shifted from the vehicle and the test bench to the desktop computer, saving time and money.
Source: ETAS
Romain Nicolas opinion:
This type of tool is clearly in tune with the times, since it allows “front loading”, i.e. a maximum lead spot at the beginning of the project to save time and shorten development time. The goal here for ETAS is to propose a comprehensive tool chain that can cover the whole V-cycle of a project. Do you think this type of blockset can really compete with native Matlab / Simulink tools like Embedded Coder, Simulink Coder or xPC Target?