The suspension of a car is a device for guiding the wheel kinematically relative to the chassis. It also contributes to other functions such as steering or braking.
The main objectives of the suspension are:
- to support vehicle weight in all driving conditions,
- to optimize the tire contact with the ground,
- to maintain the wheel plan in a good configuration of steering and camber angle with respect to the road,
- to oppose a reaction to lateral and longitudinal forces produced at the tire contact patch,
- to keep rolling movements when cornering (lateral acceleration) and pitch (dive under braking and squat under acceleration),
- to isolate the case of road irregularities to ensure passenger comfort,
- to ensure the passengers safety by maintaining the integrity of the vehicle during impact (up sidewalk, curb side shock, pothole …).
Automotive manufacturers use several design criteria to define the suspension architecture:
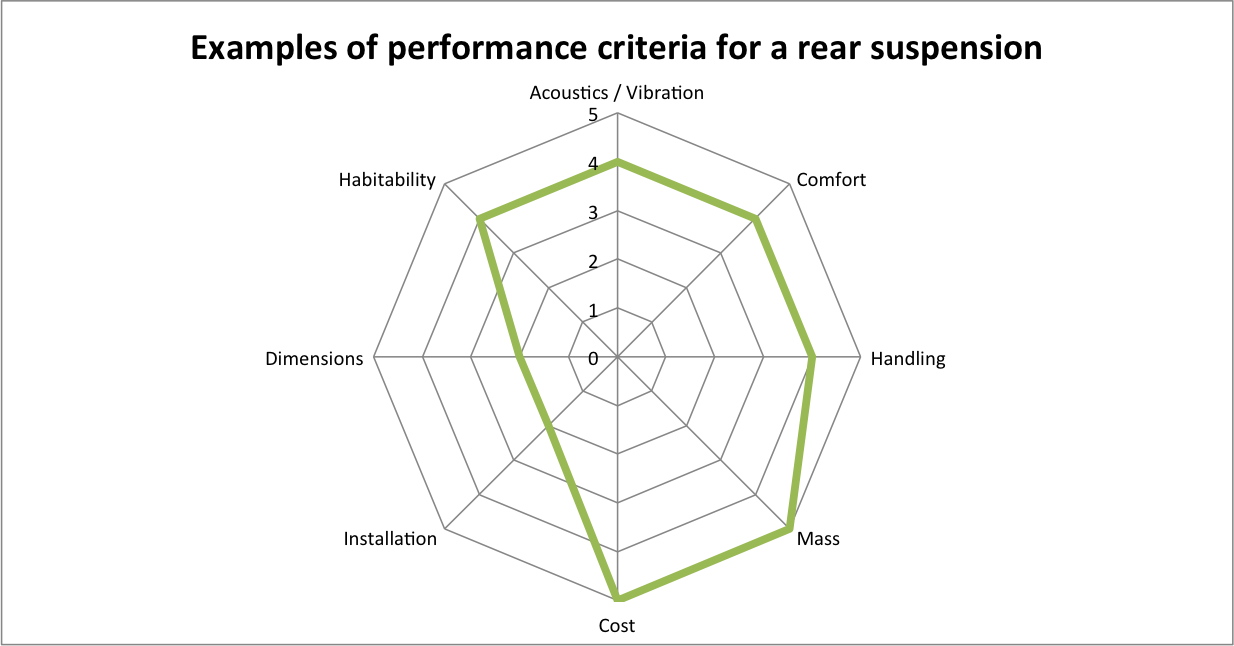
- Criteria for vehicle behavior:
- Handling
- Comfort
- Acoustics / Vibration
- Criteria for vehicle integration:
- Installation
- Habitability
- Dimensions
- Cost criterion
- Mass criterion
Vehicle driveability and filtering (vibro-acoustic comfort) are therefore managed by the vehicle suspensions (front and rear).
Those functions can be classified as follows: active safety, steering, behavior and comfort.
Active safety
Active safety encompasses all devices to prevent accidents (knocks, loss of adhesion, dropping …) through preventive action (driver information) and / or dynamic (the device “takes over” the vehicle steering).
Examples of tests for active safety during the suspension development:
Steering stability: the driver applies a steering wheel angle and release the steering wheel sharply to evaluate the steering instability. The criterion is the amplitude and the number of oscillations after stabilization of the steering wheel.Avoidance: the driver performs the moose test to evaluate the vehicle behavior during a low speed avoidance.
Steering
Turning radius (Examples: 4.3m for the Smart ForTwo and 6m for the Peugeot 508).Feedback forces in the steering wheel during a parking maneuver (low speed).Centering: running in a straight line at different speeds (80 & 100 km/h) with steering wheel oscillations of small amplitude. The validation criterion is the force feedback at the steering wheel and the delay between the driver input and the vehicle yaw response (subjective criterion).Force gradient: running in a straight line on a flat road at different speeds (80, 100, 120, 145 km/h) with steering wheel oscillations of large amplitudes. The validation criterion is the force feedback at the steering wheel and the phase difference between the driver input and the vehicle yaw response (subjective criterion).
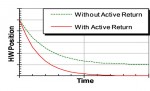
Check out the article “Torque overlay technology” to see how the steering wheel response can be improved with an electronic system.
Behavior
The behavior is the ability of a vehicle to follow a trajectory imposed. We distinguish the straight line behavior and the cornering behavior.
Straight line behavior
Directional stability: ability of a vehicle to follow a given trajectory on motorways, good and bad roadsTilt sensitivity: ability to go forward on an inclined planeCrosswind sensitivity: driveability with the steering wheel blocked, with a crosswindTraction: capacity of the driving wheels to not slip when an engine torque is appliedBraking stability: ability of the vehicle to maintain the path initially requested by the driver when braking.
Cornering behavior
Corner entry: ability of a vehicle to be placed in the desired trajectoryTrajectory: ability to follow the trajectoryCorner exit: ability of a vehicle to leave the desired trajectoryTraction: capacity of the driving wheels to not slip when an engine torque and a steering wheel angle are appliedSteering effort: forces feedback in the steering wheel when cornering
As a summary, the vehicle must:
- Respond to the orders given by the driver:
- In steady state
- In transient (during turn-in phase for example)
- Be insensitive to external disturbances:
- Irregularity of the road
- Superelevation
- Crosswind
- Be robust to:
- all load cases
- different road grip (dry, wet …)
- manufacturing dispersion
- different spare tires
- different tire pressures
- suspension components wear
Vibro-acoustic comfort
Comfort includes all vibratory phenomena experienced within the vehicle. These phenomena may occur through:
- the driving style,
- the road (bumps, potholes, manhole covers, paving etc …),
- the vehicle (driving vibration,…).
There are also sudden vibrations coming from a coupling between stresses from the road and defects of the suspension.
Acoustic includes all vibratory phenomena where the frequency is higher than 50Hz. Different sounds can be perceived by the driver in the vehicle:
- rolling noise due to road irregularities and / or tires (50 – 1000Hz)
- rumble (30 – 250 Hz) due to the powertrain
- abnormal noises (brake screeching, noise when the car goes down a sidewalk, etc …)
Conclusion:
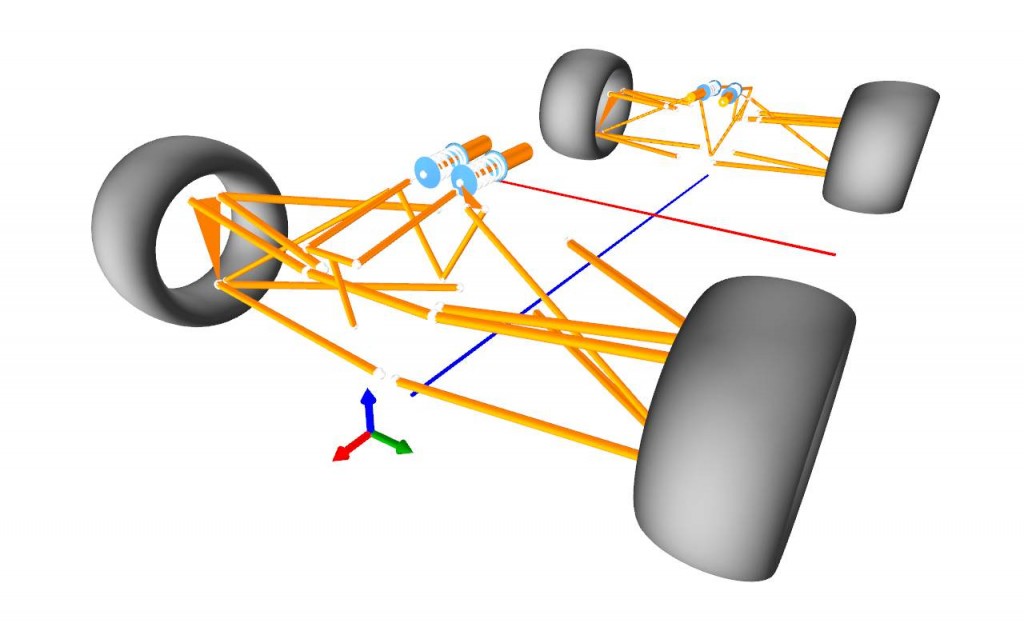
The suspension is one of the most important device in the vehicle for the active safety and the car behavior. Today, several kind of front and rear suspensions exist and are used depending on vehicle performance criteria that the automotive manufacturers define (cost, behavior, comfort,…etc). Based on those criteria, engineers can choose the good suspension type (McPherson, double wishbones, multi-link,…etc) and start the design of the suspension.








I appreciate how you pointed out that how we need to take care of safety and the routine check up for car. . Wonderful knowledge you have shared here. Thanks.